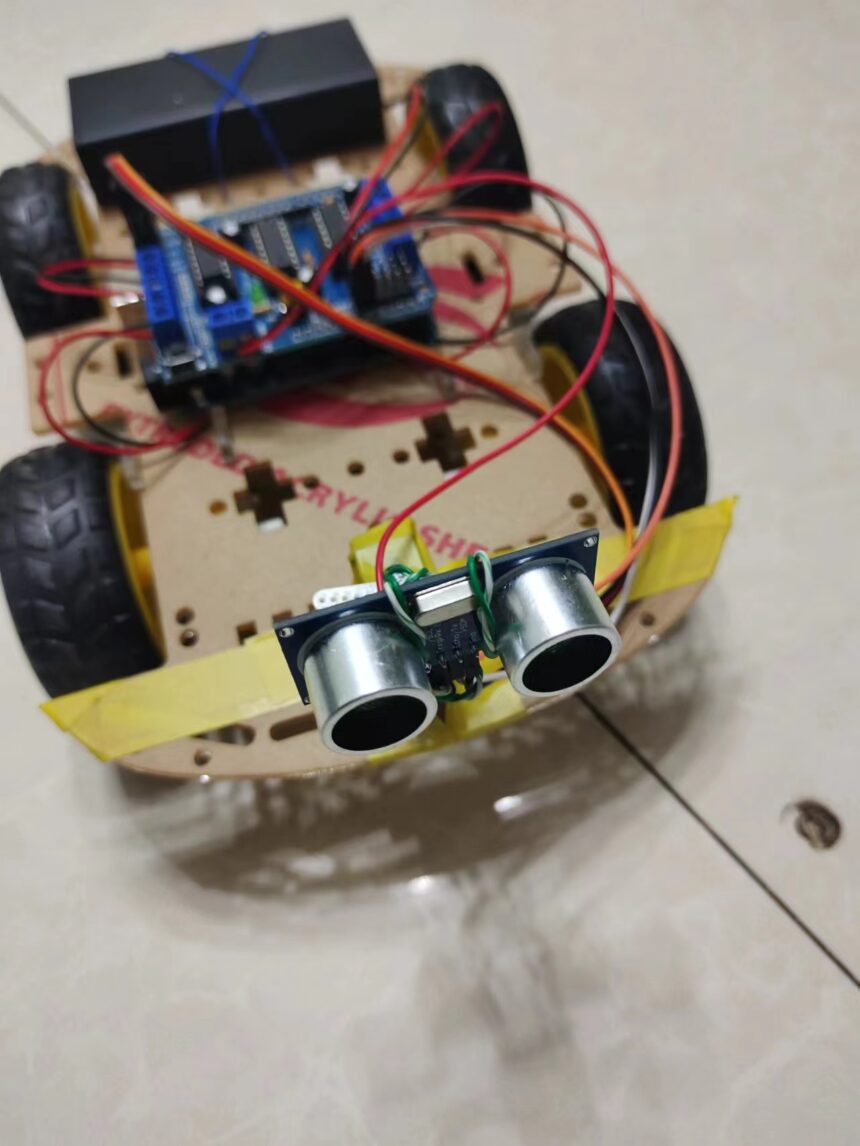
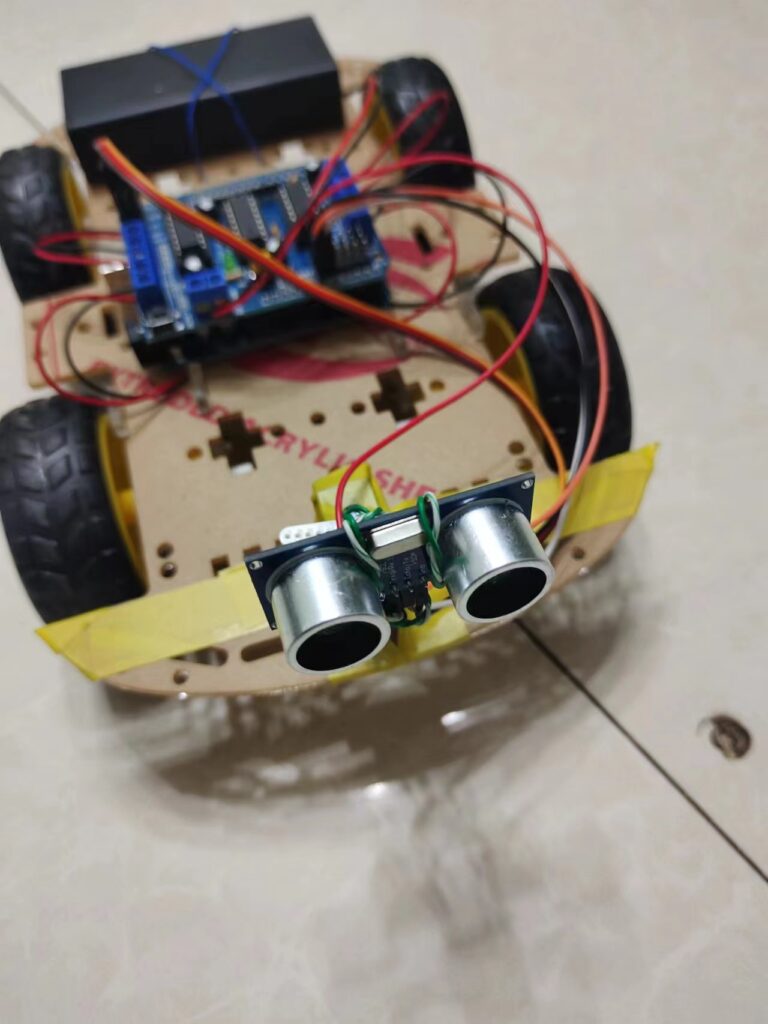
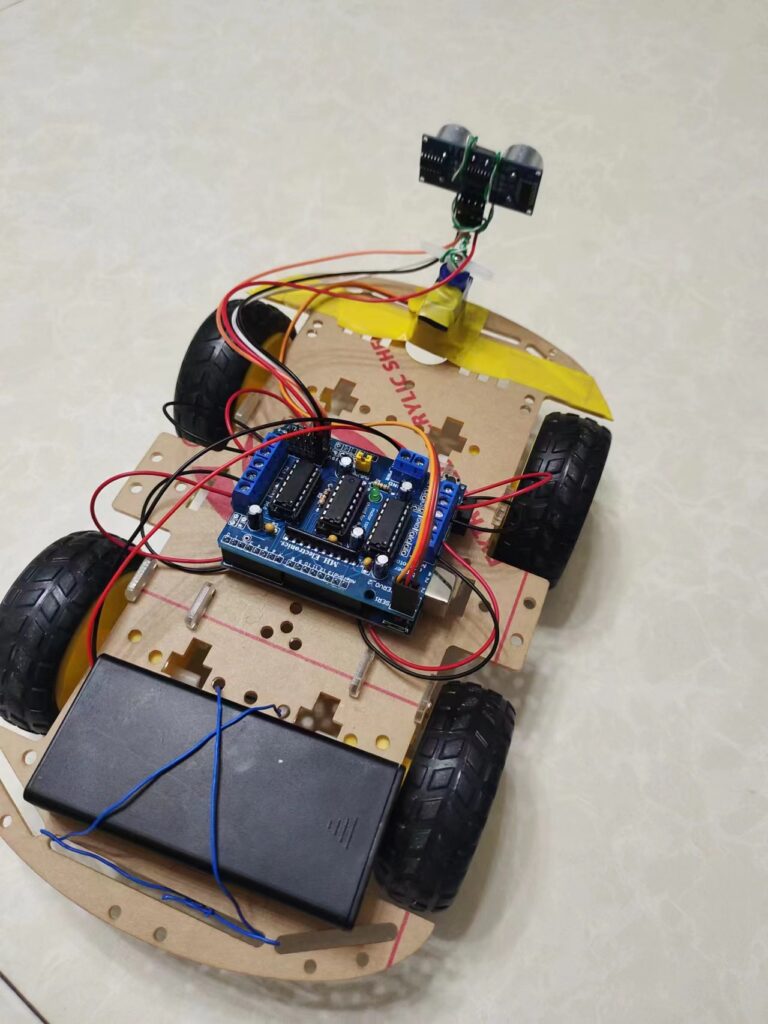
前段时间弄了一个Arduino的开发板,把随板子带的几个实验做完就放柜子里了,最近在B站上看到有人做这个小车,就是买了个底盘也马达。先是自己编程序跑了下,效果不理想,然后跟人家网上分享的代码比较了一下,差了好多呵。抄了把作业……
#include <AFMotor.h>
#include <NewPing.h>
#include <Servo.h>
#define TRIG_PIN A0
#define ECHO_PIN A1
#define MAX_DISTANCE 200
#define MAX_SPEED 120
#define MAX_SPEED_OFFSET 20
#define SPEED_STEP 1
NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE);
AF_DCMotor motor1(1, MOTOR12_1KHZ);
AF_DCMotor motor2(2, MOTOR12_1KHZ);
AF_DCMotor motor3(3, MOTOR34_1KHZ);
AF_DCMotor motor4(4, MOTOR34_1KHZ);
Servo myservo;
boolean goesForward = false;
int distance = 100;
int speedSet = 0;
void setup() {
Serial.begin(9600);
myservo.attach(10);
myservo.write(115);
delay(2000);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
distance = readPing();
delay(100);
}
void loop() {
int distanceR = 0;
int distanceL = 0;
delay(40);
if (distance <= 20) {
moveStop();
delay(100);
moveBackward();
delay(300);
moveStop();
delay(200);
distanceR = lookRight();
delay(200);
distanceL = lookLeft();
delay(200);
Serial.print("DistanceR:");
Serial.println(distanceR);
Serial.print("DistanceL:");
Serial.println(distanceL);
if (distanceR >= distanceL) {
turnRight();
moveStop();
} else {
turnLeft();
moveStop();
}
} else {
moveForward();
}
distance = readPing();
}
int lookRight() {
Serial.println("Looking Right.");
myservo.write(50);
delay(500);
int distance = readPing();
delay(100);
myservo.write(115);
return distance;
}
int lookLeft() {
Serial.println("Looking Left.");
myservo.write(170);
delay(500);
int distance = readPing();
delay(100);
myservo.write(115);
return distance;
delay(100);
}
int readPing() {
delay(70);
int cm = sonar.ping_cm();
if (cm == 0) {
cm = 250;
}
return cm;
}
void moveStop() {
Serial.println("STOP Now.");
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
}
void moveForward() {
Serial.println("Move Forward.");
if (!goesForward) {
goesForward = true;
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
for (speedSet = 0; speedSet < MAX_SPEED; speedSet += SPEED_STEP)
{
motor1.setSpeed(speedSet);
motor2.setSpeed(speedSet);
motor3.setSpeed(speedSet);
motor4.setSpeed(speedSet);
delay(5);
}
}
}
void moveBackward() {
Serial.println("Move Backward.");
goesForward = false;
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
for (speedSet = 0; speedSet < MAX_SPEED; speedSet += SPEED_STEP)
{
motor1.setSpeed(speedSet);
motor2.setSpeed(speedSet);
motor3.setSpeed(speedSet);
motor4.setSpeed(speedSet);
delay(5);
}
}
void turnLeft() {
Serial.println("Turn Right Now.");
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
delay(500);
Serial.println("Turn Right Complate.");
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
void turnRight() {
Serial.println("Turn Left Now....");
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
delay(500);
Serial.println("Turn Left Complate....");
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
}
发表回复